This blog is about my interest in Computer Science in Education. I am an FE lecturer who teaches programming and computer hardware. I am always keen to investigate new areas and new ways to teach and enthuse my students about computer science. I'm no expert, most of what I will write about here is my own efforts to teach myself more about his topic.
Currently I am developing my skills in programming and robotics using the
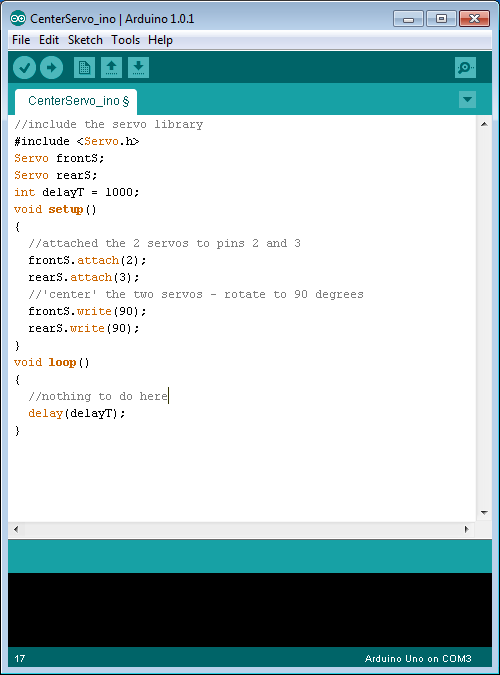
Arduino board (you can read lots about the Arduino
here). I only received the board a couple of weeks ago so I haven't got very far with it, but I am hoping to explore the area of robotics with it.
I ordered the Arduino starter kit from Proto-PIC via Amazon (details
here). This comes with a small breadboard and some components. I made a little base to hold both the Arduino and the breadboard and got started with the examples off the Ardunio web site (see
here).
I pretty soon discovered that although the kit is a good starter its pretty limited as it does not have any transistors or motors. So I had to search elsewhere for these...
(In case you are wondering why I mention the Raspberry Pii, I have one on order, It has been on order for some time! As soon as it arrives I will post some experiences with it here)